開発テーマ
- 赤外線リモートコントロール
- ライン・トレース
- R8マイコン版
- H8マイコン版+開発言語
- H8マイコン版+OS
- テレイグジスタンス実験機
- バーチャル・ライブ・システム応用
- その他
-
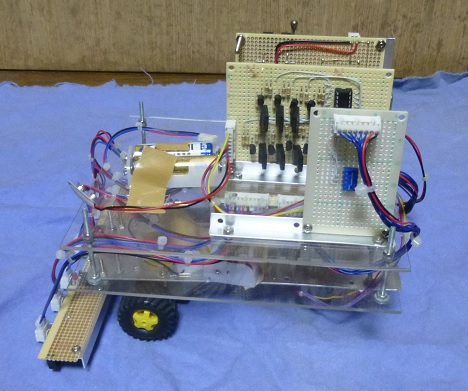
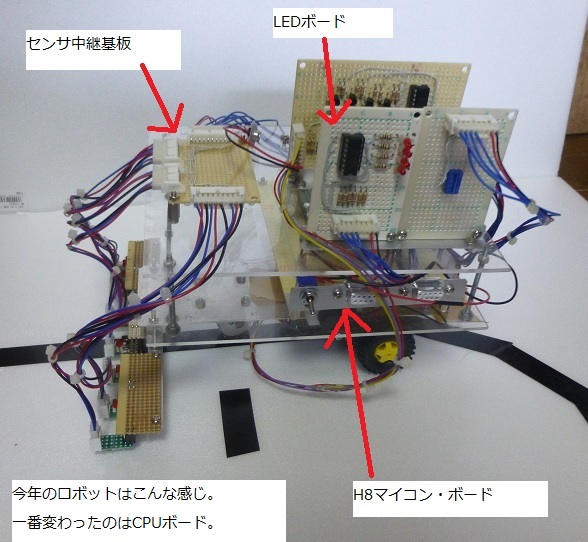
車輪で走行するロボットで、各種実験を行うための最も基本となる車体部分をまず作ります。
この車体に、様々なI/Oをとっかえひっかえ接続し、実験を行う作戦です。
赤外線リモートコントローのI/OとしてはDCモーター・ドライブと赤外線受信部となりますが、
それぞれケーブルでCPU基板に接続します。
CPUとしては暫定的にR8マイコンを使い、OSレスの環境下での動作させます。
制御プログラムは、C言語で記述します。
いわゆる、組み込み装置のイメージです。
-
赤外線リモートコントロール・ロボットの車体にライン・センサーを取り付けて
ライン・トレース・ロボットの実験を行います。CPUはR8マイコンのままです。
ライン・トレースは本来やりたい、バーチャル・リアリティ応用とは方向性が違うのですが、
バーチャル・リアリティは時間がかかり過ぎるので、中間目標として設定しました。
これを使って、マイクロ・マウス大会に参加します。ただし、性能はほどほどで
がまんするものとします。(^^;
2022/11時点で、制作はほぼ完了し、目標としていたマイクロマウス大会での
完走も実現しており、ドキュメント制作(→ホームページ制作)のみが残件となっています。
-
R8マイコン版のライン・トレース・ロボットのCPUをH8マイコンに変更します。
これに伴い、I2C ROMを接続し、暫定的な自作言語が動作する環境を制作します。
マイクロ・マウス大会には一度参加していますが、ソフトウェアの開発が大幅に
遅れているため、当初の目標は達成しておらず、2022/11時点で現在進行形です。
-
H8マイコン上で自作OSが動作するような環境を構築します。
ハードウェアの開発項目はなく、ソフトウェア開発のみとなる予定です。
-
私にとってロボットはあくまでバーチャル・リアリティを実現するための手段です。
まずはテレイグジスタンスに挑戦したいのですが、これだけでも、マスター・スレーブの
アームや無線通信・画像の伝送・立体視など盛りだくさんの開発項目があります。(>_<)
-
これこそが現状本当にやりたいテーマです。人工知能やディジタル信号処理の技術、
更に芸術のセンス(?)も必要となるので、どこまで出来るか・・・。(^o^;
-
エージェント機能や二足歩行などを想定していますが、このテーマにたどり着く
ことは難しいでしょう・・・・・(^o^;
開発計画と検討課題

赤外線リモコン誘導(工事中)
- 概要
- 仕様
- 外観
- 製作
-
企画中
赤外線リモコン誘導ロボットの詳細はこちらです。(工事中)
ライン・トレース(1版)(工事中)
- 概要
- 仕様
- 外観
- 製作
-
フォト・リフレクタにより白色(または黒色)のラインを検出しながら、
ライン・トレースするロボットです。
移動はマブチ・モータと田宮のギヤ・ボックスを使用していますが
移動速度は速くはないです。
-
一応(?)、マイクロマウス大会のロボ・トレース競技に参加出来るロボットを
製作します。ただし、ロボットの速度が(著しく)遅いため、決勝進出は望むべくもなく
完走することのみを目標とします。
ライン・トレース・ロボット(1版)の詳細はこちらです。(工事中)
ライン・トレース(2版)(工事中)
- 概要
- 仕様
- 外観
- 製作
-
ライン・トレース・ロボットのCPUをR8マイコンからH8マイコンに変更した
したバージョンです。制御プログラムは仮想機械上で動作する自作言語を
を使用します。
車体やメカは1版と同じなので、相変わらず移動速度は速くはないです。
-
後報。
ライン・トレース・ロボット(2版)の詳細はこちらです。(工事中)
共通プラット・フォーム開発(見直し中)
- ソフトウェア構成(2005/08/25) (2006/04/22改)(2009/08/19改)(2010/06/20改)(2015/07/04見直し中)
- 開発環境
- 評価・デバッグ
| モニター C言語版 |
アプリケーション (マルチタスク版)
| VM- OS/6 | モニター (VM マルタ タスク版) | アプリケーション (シングルタスク版)
| VM- OS/5 | モニター (VM版) | SIMPL コンパイラ /エディタ (FORTH版) | VM アセンブラ /エディタ | ||||||
| VM-OS/4 | Tiny BASIC | |||||||||||||
| FORTH | VTL | |||||||||||||
仮想機械3(VM)
| 仮想機械2(VM) | |||||||||||||
| ハードウェア(H8/3069,SH2) | ||||||||||||||
・緑色は既存品を利用。黄色は新規開発予定。青色はプロトタイプ完成。赤色は開発中。
・μITRONは、パソコン上ではマルチタスク機能のみ実現
・OSは3世代に分けて開発する。(VM-OS/4→VM-OS/5→VM-OS/6)
初代のVM-OS/4はロボットには搭載せず、VM-OS/5の開発環境としてのみ用いる。
VM-OS/5、VM-OS/6のカーネルはROM化可能とする。
-
H8パソコン(phase1)(工事中)
マスタ・スレーブ制御アーム
- 検討課題
無線誘導(無線LANに変更予定)
- 簡易ディジタル無線通信(2009/07/19)
無線によるデータの通信量が少ないことから、当面、安価なワイヤレス・マイク
とFMラジオを使用した簡易無線方式を開発し利用することとする。
- 変調方式と無線通信システム構成 本方式においては、調歩同期方式のシリアル信号を、音声帯域のFM放送波
- Phase.1構成
- ソフトウェア処理方式FSK変調/復調 FSK変調においては、伝送速度300bpsまたは600bpsのシリアル信号を、
- 受信状態の監視 無線による回線は、動作が不安である。このため、無線データが復調器まで
- フレーム・フォーマット
【後報】
に載せるために、1200Hz/2400HzのFSK変調を行う。FSK変調と復調は、
ハード物量削減のためにPICマイコンによるソフトウェア処理により実現する。
シリアルデータの伝送速度は、最初300bps、次に600bpsにて
実験するものとする。通信は原則として、ポイント・ツー・ポイントとするが、
フレーム・フォーマットの中には将来用、及びデータの整合性確認に
使用するため、1バイトの宛先アドレスを埋め込むものとする。
移動局から制御局へ無線通信は、映像信号を送る場合は、
映像信号の音声チャネルを使用して伝送する。
論理”1”のとき1200Hz、論理”0”のとき600Hzの変調信号によりFSK変調する。
本変調/復調はPICマイコンのソフトウェア処理によって実現する。
下図にソフトウェア処理方式FSK変調/復調のタイムチャートを示す。
処理はタイマーによる定周期割込みによってサンプリングすることにより
タイミングが取られる。
割込時間は、PICマイコンのクロック周波数(後報)MHzを内蔵タイマーにて
256分周した周期(約100μS)にてインターバル・タイマー割込みを入れ、
この割込みをシリアル・データの送信タイミングと、受信データのサンプリングの
タイミングに使用する。
到達していることをLEDまたはLCDで表示する機能が不可欠である。
また、LCD表示または、統計データとして、受信エラーの発生回数などの
情報取得、参照手段も要である。
- 検討課題
- 赤外線通信
- NTSC方式画像信号伝送
- modemレス方式による9600bps通信
バーチャル・リアリティ応用(V.2.3)【作成中】
- システム全体構成
- 外部仕様
- (1)システム概要
システム全体は、3輪自動車ロボットとこれをリモート制御するための操縦席(コックピット)より
構成される(厳密には操縦者自身もシステムの一部である)。ロボットはタイヤにより移動することが出来る。
また、ロボットはカメラとマイクを持ち、画像と音声を操縦席に伝える。このため、操縦者はロボットの
視点からロボットを運転することができる。更に、ロボットは1本のアームとアームの先端に取付けられた
1対のハンドを持ち、物を掴むことが出来る。ロボットのハンドは触覚を持ち、物を掴んだときの
反作用力は操縦者のハンドに伝えられるため、操縦者はロボットが物を掴む力をハンドの握力により
知ることが出来る。操縦者はバーチャル・リアリティの機能を利用してロボットの操縦を行う。
このため、操縦者はまるでロボットに乗車しているような感覚でロボットを運転し、
自分の腕を動かすことにより、ロボットのアームとハンドを操作することが出来る。
- (2)リモート操縦機能< ロボットはタイヤにより移動することが出来る。タイヤは左右独立に回転速度と回転方向を制御
- (3)リモート首制御機能 ロボットは2自由度を持つ首を持ち、この首にはカメラとマイクが取付けられている。
- (4)リモート・アーム/ハンド制御機能 ロボットは1本のアームと物を掴むことが出来るハンドを1対持つ。
- (5)画像信号伝送機能 ロボット操縦者は、ロボットの首に取付けられたCCDカメラによりロボットからの
- (6)双方向音声信号伝送機能 ロボット操縦者は、ロボットの首に取付けられたコンデンサー・マイクにより
- (7)触覚機能 ロボットのハンドは圧力センサーなどによる触覚を持ち、
- (8)オプション機能 (8.1)ホストPCとの通信機能
- 内部仕様
- メッセージ・スーパーインポーズ機能
- 機能の目的 リモート制御される台車にカメラを搭載し、その映像信号を無線にて制御局に送信した後、
- (a)移動局のカメラの方向を手動にて切替えると、移動局のある場所に操縦者が居るとゆう 臨場感が損なわれる。移動局のカメラの方向切替えは、操縦者の首の動きに連動して
- (b)パソコンでNTSC信号を取込む方式では、普及傾向にある画像の取込みボードであるが、 まだボードの分コストが高くなる。また、また市場に多数ある性能の低いパソコンでは処理に無理が出る。
- (c)画像取込みボード付きのパソコンであっても、信号を受け取ってから、 表示するまで数秒の遅れが発生する。リアルタイムで移動局をリモート制御する場合、
- スーパーインポーズのシステム構成と方式
- 以下、検討中
することが可能であり、ロボットは前進/後進、右折/左折など移動することが出来る。
ロボットが移動する方向や速度の制御は、ロボット操縦者がコックピットより行い、
制御データはディジタル化され、無線電波にてロボットに伝えられる。移動の方向は
操縦者の操作するハンドルに取付けられたセンサから、また移動の速度は操縦者の操作する
ペダルに取付けられたセンサーからの情報により制御される。
このため、操縦者は自動車と同様の感覚でロボットを移動制御することが出来る。
操縦者の頭部には操縦者の首の方向を検出するためのセンサーが取付けられており、
ここから検出されたデータによりロボットの首の方向が制御される。
このため、操縦者は自分の首を回すことによりロボットの首に取付けられたカメラと
マイクの方向を制御することが出来るため、あたかも操縦者がロボットの位置に
居るような感覚を生成することが出来る。
アームは3自由度、ハンドは1自由度を持つ。アームは3自由度を持つことにより、
アームの届く距離であれば、ほぼ3次元空間の任意の位置にハンドを移動することが出来る。
アームとハンドの制御はロボット操縦者の腕と手に取付けられたセンサーからの
位置信号で制御され、操縦者の腕と手の動きと同一の動作をする。
センサーからの信号はディジタル化され、無線電波によりロボットに伝えられる。
アームとハンドはコストの点から当面1本とする。
視覚で周りの光景を見ることが出来る。カメラの移動方向は、水平方向の回転、
及び上下方向の回転の2自由度を持つ。画像信号はテレビ放送の周波数帯による電波により
操縦席まで伝送される。画像は、当初は1chとするが、最終的には2chとし、
左右の目の画像を別々に伝送することにより、立体視を可能とする。
ロボットの居る地点での音声を聞くことが出来る。マイクの移動方向は、水平方向の回転、
及び上下方向の回転の2自由度を持つ(CCDカメラと同一)。
音声信号はFMラジオ放送の周波数帯による電波により操縦席まで伝送される。
音声は、当初は1chとするが、最終的には2chとし、左右の耳の音声を別々に
伝送することにより、音の伝搬方向の聞取りを可能とする。
また、ロボット操縦者は、自分の話声をマイクで拾い、これをロボットに取付けられた
スピーカーにより再生することが出来る。音声信号はFMラジオ放送の周波数帯による
電波によりロボットまで伝送される。ロボットへ送信する音声は1chとする。
以上の機能により、音声はロボットと操縦席とで双方向に伝送されるため、
ロボットの操縦者とロボットの傍にいる第三者とが音声にて会話することが可能となる。
この触覚より得たデータはディジタル化され無線電波により操縦席に伝えられる。
操縦席では、触覚データにより、操縦者がハンドを握る反作用の力を調整することにより、
ハンドが物を掴んでいる感触を操縦者のハンドに伝え、あたかも操縦者が
直接物を掴んでいるかのような(バーチャル・リアリティ)感覚を操縦者に与える。
同時に、ロボットが物を掴む力を操縦者のハンドの操作により調整することを可能とする。
操縦側プロセッサには、ホストPCとの間でシリアル通信を可能とする。
このシリアル通信の目的は、ホストPCから操縦側、およびロボット側のプロセッサの動作状態の監視、
タスクの登録・起動・停止などのデバッグ、テスト・データの注入などに使用する。
ホストPC側のプログラムはVBAにて記述する(VBAからシリアル回線を制御するAPI関数を呼出すことにより、
WindowsTM環境にて簡単に制御プログラムを開発出来るため)。
(8.2)VBA-Prologによる知識処理機能
ホストPCには、VBAにて記述したProlog処理系を搭載する。このProlog処理系を使用することにより、
ロボットからのセンサ情報をPC側にて知識処理し、
その処理結果を用いてロボットを制御する知能ロボットの実験プラットフォームを構築する。
(8.3)VBAによる画像処理機能
ホストPCは画像入力装置より取り込んだディジタル画像信号を、
VBAにより記述されたプログラムにより画像認識する実験に用いることが出来る。
この画像認識結果は、前項1.9.2のProlog処理系に渡すことにより、知識処理の入力として用いる。
表示装置にて操縦者はモニターすることとなる。表示装置としては、
パソコンの表示装置が最も手頃であるが、パソコンの表示装置を本システムの
表示装置として使用することは、以下のような問題点がある。
動作すべきである。この場合、操縦者が動かした首の動きに合わせて、
表示装置の位置も変わらなければならない。すなわちHMD(Head Mounted Display)である必要がある。
この遅れ時間は致命的となる。
以上の観点から、画像信号の表示はパソコンではなく、数千円のLCDディスプレイを用いることとする。
しかし、この場合でもパソコンまたは制御用コンピュータから操縦者に対して何だかのメッセージを
表示したくなることは考えられる。このメッセージがパソコンの画面に表示されると、
操縦者は移動局から送られてくる画像表示用のLCDとパソコン画面の両方を見なければならず、
操作性が悪い。そこで、LCDのNTSC信号に対して、文字情報をスーパーインポーズ出来ると操作性が向上する。
ただし、コストの上昇を最低限に押さえるために、スーパーインポーズは文字のみとし、
文字色は固定(白または黒)とする。なお、立体視するために、
画像信号を2チャンネル化した場合の対応については、将来検討とする。【後日別途検討】
画像処理(見直し予定)
- 検討課題
- サッカー・ロボット用簡易画像入力装置案(2006/05/07) (1)画像の情報量を圧縮するため、マイコンに入力する前にハードウェアで処理を行う。
(2)色の違いを輝度で判定する。このため、2値化の閾値を変えられるようにする。
人工知能
ここの項目は人工知能のページで検討する。- 検討課題
- Prologを拡張し、制御に応用する。
- チャット・ボット
- 音声合成
- 音声認識
エージェント機能
- 検討課題
二足歩行(未定)
- 検討課題
参考文献
| No. | 書名 | 出版社 | 著者 | 特徴 | 備考 |
| 1 | メカトロ・エンジニアリング(9) ロボット力学 (1999)第2版 | パワー社 | 黒須茂 山崎敬則 亀岡紘一 | -- | -- |
| 2 | 初めて学ぶ基礎ロボット工学 (2003)第1版4刷 | 東京電機大学出版局 | 小川鑛一 加藤了三 | -- | -- |
| 3 | 第2版初めて学ぶ基礎制御工学 (2004)第2版4刷 | 東京電機大学出版局 | 森政弘 小川鑛一 | -- | -- |
| 4 | 初めて学PID制御の基礎 (2006)第1版1刷 | 東京電機大学出版局 | 江口弘文 | -- | -- |
| 5 | 二足歩行ロボット 製作超入門 (平成17年、2005)第1版第1刷 | オーム社 | 浅草ギ研 | -- | -- |
| 6 | ヒューマノイドロボット (平成17年、2005)第1版第1刷 | オーム社 | 梶田秀司 | -- | -- |
| 7 | 製作実習で学ぶ ロボティクス入門 (平成18年、2006)第1版第1刷 | オーム社 | 高橋良彦 | -- | -- |
| 8 | 絵ときでわかる ロボット工学 (平成19年、2007)第1版第1刷 | オーム社 | 川嶋健嗣 | -- | -- |
| 9 | 絵ときロボット工学基礎のきそ (2007)初版第1刷 | 日刊工業新聞社 | 門田和雄 | -- | -- |
| 10 | ロボットシミュレーション Open Dynamicd Engineによる ロボットプログラミング (2008)第1版第3刷 | 森北出版 | 出村公成 | -- | -- |
| 11 | 基礎からの 自動制御と実装テクニック (2011)初版第1刷 | 技術評論社 | 熊谷英樹 日野満司 村上俊之 桂誠一郎 | -- | -- |