2端子対回路
2対からなる2端子対回路(4端子回路とも言う)として扱うことをしばしば
行います。2端子対回路の一般論は電気回路学で学びますが、
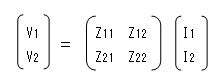
入力電圧・入力電流・出力電圧・出力電流の関係を2×2の行列で表現します。
ここではY行列、Z行列、H行列について記載します。
(行列の代わりにパラメータと呼ぶこともあります。)
Yパラメータ
接続した状態を考えます。
端子1-1'間の電圧をV1、端子1に流れ込む電流をI1
端子2-2'間の電圧をV2、端子1に流れ込む電流をI2
とします。ここで、E1、E2、V1、 I1、V2、I2は、一般的には
フェーザ表示です。
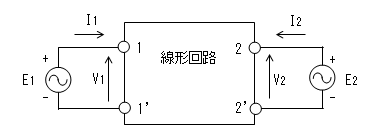
回路全体が線形なので、重ね合わせの理を使って、I1、I2 を求めます。
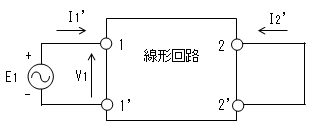
まず、E2 = 0としたとき、端子1に流れる電流をI1'
端子2に流れる電流をI2'とすれば、I1'、I2'は V1に比例するので、
比例定数をY11、Y21として下記の式が成り立ちます。
I1' = Y11 * V1
I2' = Y21 * V1
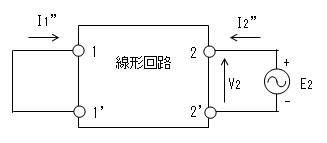
次に、E1 = 0としたとき、端子1に流れる電流をI1"
端子2に流れる電流をI2"とすれば、I1"、I2"は V2に比例するので、
比例定数をY12、Y22として下記の式が成り立ちます。
I1" = Y12 * V2
I2" = Y22 * V2
E1とE2が同時に存在したときの電流、I1、 I2は
重ね合わせの理により下記の式となります。
I1 = I1' + I1" = Y11 * V1 + Y12 * V2
I2 = I2' + I2" = Y21 * V1 + Y22 * V2
これを行列の式で表すと、
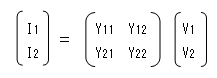
Y11、 Y12、Y21、Y22は電圧に かけると電流になる比例定数なので、
アドミタンスになります。
そして2×2型の行列YをYパラメータと呼びます。
Yパラメータが純抵抗(コンダクタンス)の場合は小文字を用います。
Yパラメータの等価回路
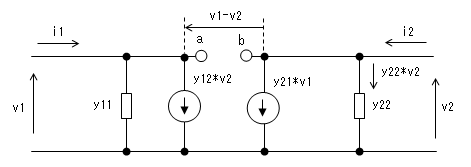
i1 = y11 * v1 + y12 * v2 ・・・・・ ①
i2 = y21 * v1 + y22 * v2 ・・・・・ ②
の式が成り立ちます。ここではYパラメータは純抵抗として小文字で表しています。
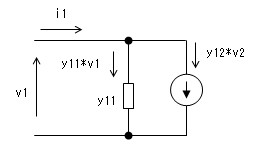
この式から等価回路を導きます。
①式より電流i1は、電流(y11 * v1)と 電流(y12 * v2)の和です。
①式の第1項(y11 * v1)は電圧v1に アドミタンスY11[S]
の抵抗(つまり抵抗値は1/y11[Ω])を接続したときに流れる電流ですので、
下図のように1-1'端子間に接続した抵抗y11[S]で表すことが出来ます。
第2項は、2次側の電圧V2に比例した 制御電流源とします。
②式より2次側の電流i2についても同様に考えると、yパラメータの
等価回路は一応下図で表せます。
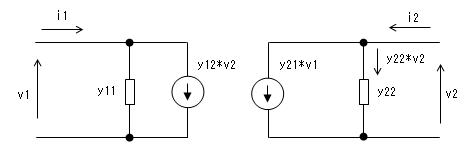
しかし、この等価回路は1次側と2次側が分離していて使いずらいので、
以下の手順で変形します。
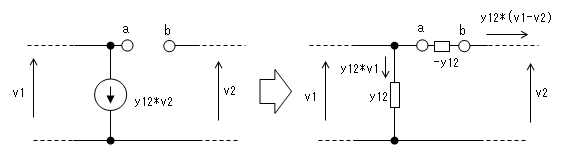
まず、①式の第2項を変形します。
y12 * v2 = -y12 * (v1 - v2) + y12 * v1
この式の第1項は、下図のようにa点とb点との間にアドミタンス-y12を
挿入したときa→bに流れる電流です。
第2項は、y11と並列に接続した抵抗y12[S]で表すことが出来ます。
式の変形により、1次側の制御電流源 は、下図のようにふたつの抵抗に変形する
ことが出来ます。a-b間の抵抗y12にはマイナスがつきますが、これはy12自体が
マイナスなので、マイナスをつけることでプラスになるからです。
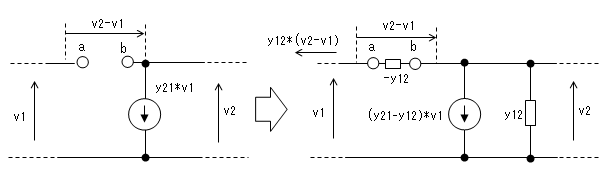
次に2次側を変形します。②式の第1項を以下のように変形します。
1次側の等価回路の変形により、b点から-y12 * (v1 - v2) の電流が
流れ込んでくることを考慮して、
(下図では、a-b間の電圧の極性の取り方を逆にしていることに注意)
y21 * v1 = -y12 * (v2 - v1) + (y21 - y12) * v1 + y12 * v2
この式の第1項は-y12をb→aに流れる電流、第2項は 制御電流源に置換え、
第3項は、y22と並列に接続した抵抗y12[S]で表すことが出来ます。
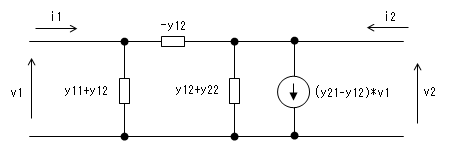
以上の変形から、下図の等価回路が得られます。
これをYパラメータにおけるπ(パイ)型等価回路といいます。
(抵抗はアドミタンス表示なので、並列接続の合成抵抗は加算となります。念のため)
Zパラメータ
2端子対回路において
V1、V2を従属変数、I1、I2を独立変数 としたとき、
Z11、 Z12、Z21、Z22を比例定数として
下記の式でV1、V2を表します。
V1 = Z11 * I1 + Z12 * I2
V2 = Z21 * I1 + Z22 * I2
これを行列の式で表すと、
Z11、 Z12、Z21、Z22は電流に かけると電圧になる比例定数なので、
インピーダンスになります。
そして2×2型の行列ZをZパラメータと呼びます。
Zパラメータが純抵抗の場合は小文字を用います。
Zパラメータの等価回路
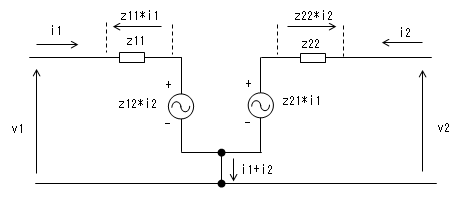
v1 = z11 * i1 + z12 * i2 ・・・・・ ③
v2 = z21 * i1 + z22 * i2 ・・・・・ ④
の式が成り立ちます。ここではZパラメータは純抵抗として小文字で表しています。
この式からただちに下記の等価回路が導けます。
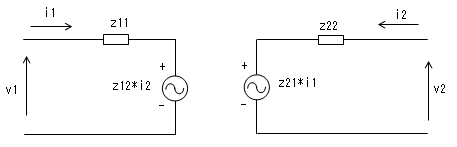
しかし、この等価回路も1次側と2次側が分離していて使いずらいので、
以下の手順で変形します。方針としては下図のように(i1+i2)
の項を生成するように変形します。
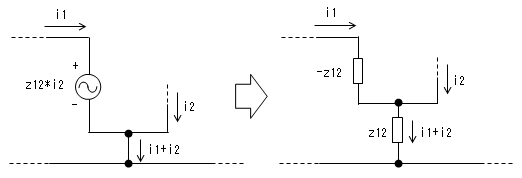
まず、③式の第2項を変形します。
z12 * i2 = z12 * (i1 + i2) - z12 * i1
この式の第1項は抵抗z12に電流(i1+i2)が流れたときの 電圧を表します。
第2項は抵抗-z12に電流i1が流れたときの電圧を表しますので、
1次側の電圧源は下図のように表せます。
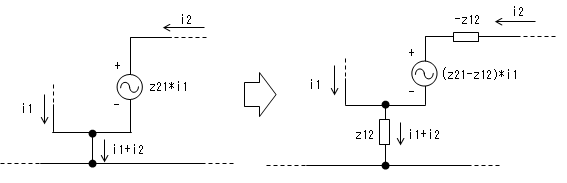
次に、④式の第1項を変形します。
z21 * i1 = z12 * (i1 + i2) + (z21 - z12) * i1 - z12 * i2
この式の第1項は抵抗z12に電流(i1+i2)が流れたときの 電圧を表します。
第2項は比例定数が(z21-z12)で電流i1に比例する
制御電圧源 とします。第3項はz22と直列になる抵抗の両端の電圧となります。
以上より、2次側の電圧源は下図のように表せます。
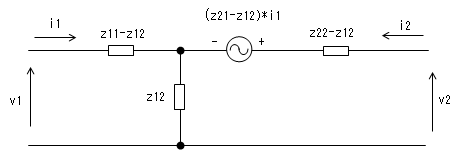
以上の変形から、下図の等価回路が得られます。
これをZパラメータにおけるT型等価回路といいます。
Hパラメータ
2端子対回路において
V1、I2を従属変数、I1、V2を独立変数 としたとき、
H11、 H12、H21、H22を比例定数として
下記の式でV1、I2を表します。
V1 = H11 * I1 + H12 * V2
I2 = H21 * I1 + H22 * V2
何とも覚えずらい式で往生してしまいますが(笑)、バイポーラ・トランジスタを
等価回路で表現するとき、Hパラメータがもっともトランジスタの特徴を表します。
(バイポーラ・トランジスタを使うとき、いやでも覚えてしまいます。笑)
これを行列の式で表すと、

H11はインピーダンス、 H12は無名数、
H21は無名数、H22はアドミタンスになります。
そして2×2型の行列HをHパラメータと呼びます。
フェーザ表示する必要がない場合は小文字を用います。
Hパラメータの等価回路
v1 = h11 * i1 + h12 * v2 ・・・・・ ⑤
i2 = h21 * i1 + h22 * v2 ・・・・・ ⑥
の式が成り立ちます。ここではHパラメータは純抵抗として小文字で表しています。
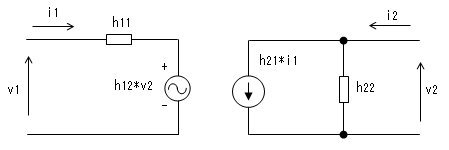
⑤式より、v1は(h11 * i1)と(h12 * v2)の 電圧の和です。
第1項の(h11 * i1)は、抵抗h11に電流i1が流れたときの
抵抗h11の両端の電圧を表します。
第2項の(h12 * v2)は、h12を比例定数とするv2による 制御電圧源とします。

⑥式より、i2は(h21 * i1)と(h22 * v2)の 電流の和です。
第1項の(h21 * i1)はh21を比例定数とするv1による 制御電流源とします。
第2項の(h22 * v2)はコンダクタンスh22に電圧 v2を
印加したときh22に流れる電流を表しています。

以上より、下記に示すhパラメータの等価回路が導けます。
参考文献
- 簡明電子回路入門(1980 初版) 第4章 4端子回路理論、矢部初男著、槇書店
パラメータの相互変換(計算式)
(1)変換前のパラメータから式を作る
(2)変換前後の独立変数と従属変数を意識しながら式を変形する。
(3)変換後の式の形になったら、係数から変換式を取り出す。
と、言ったところです。
- ZパラメータからYパラメータへの変換 Zパラメータの式は下記でした。
- HパラメータからYパラメータへの変換 Hパラメータの式は下記でした。
- YパラメータからZパラメータへの変換 Yパラメータの式は下記でした。
- HパラメータからZパラメータへの変換 Hパラメータの式は下記でした。(再掲)
- YパラメータからHパラメータへの変換 Yパラメータの式は下記でした。(再掲)
- ZパラメータからHパラメータへの変換 Zパラメータの式は下記でした。(再掲)
- パラメータ変換の一覧表 以上の計算を纏めると下記の表となります。
v1 = z11 * i1 + z12 * i2 ・・・・・ (1)
v2 = z21 * i1 + z22 * i2 ・・・・・ (2)
Yパラメータの従属変数はi1、i2なので、ここではi2を 消去するために
(1)式にz22をかけ、(2)式にz12をかけて辺々引きます。
z22 * v1 - z12 * v2 = (z11 * z22 - z12 * z21) * i1
⊿z = z11 * z22 - z12 * z21と 置換えて、i1の式に変形すると
i1 = (z22 / ⊿z) * v1 - (z12 / ⊿z) * v2
Yパラメータの式と比較すると
y11 = z22 / ⊿z
y12 = -z12 / ⊿z
を得ます。次に、i1を消去するため
(1)式にz21をかけ、(2)式にz11をかけて辺々引きます。
z12 * v1 - z11 * v2 = -(z11 * z22 - z12 * z21) * i2
⊿z = z11 * z22 - z12 * z21と 置換えて、i2の式に変形すると
i2 = -(z12 / ⊿z) * v1 + (z11 / ⊿z) * v2
Yパラメータの式と比較すると
y21 = -z12 / ⊿z
y22 = z11 / ⊿z
を得ます。
v1 = h11 * i1 + h12 * v2 ・・・・・ (3)
i2 = h21 * i1 + h22 * v2 ・・・・・ (4)
Yパラメータの従属変数はi1、i2ですが、(3)式を変形すると
ただちにi1の式が得られます。
i1 = 1 / h11 * v1 - (h12 / h11) * v2 ・・・・・ (3')
Yパラメータの式と比較すると
y11 = 1 / h11
y12 = -h12 / h11
を得ます。次に、i1を消去するため(3')式を(4)式に代入します。
i2 = h21 * {1 / h11 * v1 - (h12 / h11) * v2} + h22 * v2
= (h21 / h11) * v1 - (h12 * h21 / h11) * v2 + h22 * v2
= (h21 / h11) * v1 + {(h11 * h22 - h12 * h21) / h11)} * v2
⊿h = h11 * h22 - h12 * h21と 置換えると
i2 = (h21 / h11) * v1 - (⊿h / h11) * v2
Yパラメータの式と比較すると
y21 = h21 / h11
y22 = ⊿h / h11
を得ます。
i1 = y11 * v1 + y12 * v2 ・・・・・ (5)
i2 = y21 * v1 + y22 * v2 ・・・・・ (6)
Zパラメータの従属変数はv1、v2なので、ここではv2を 消去するために
(5)式にy22をかけ、(6)式にy12をかけて辺々引きます。
y22 * i1 - y12 * i2 = (y11 * y22 - y12 * y21) * v1
⊿y = y11 * y22 - y12 * y21と 置換えて、v1の式に変形すると
v1 = (y22 / ⊿y) * i1 - (y12 / ⊿y) * i2
Zパラメータの式と比較すると
z11 = y22 / ⊿y
z12 = -y12 / ⊿y
を得ます。次に、v1を消去するため
(5)式にy21をかけ、(6)式にy11をかけて辺々引きます。
y21 * i1 - y11 * i2 = -(y11 * y22 - y12 * y21) * v2
⊿y = y11 * y22 - y12 * y21と 置換えて、v2の式に変形すると
v2 = -(y21 / ⊿y) * i1 + (y11 / ⊿y) * i2
Zパラメータの式と比較すると
z21 = -y21 / ⊿y
z22 = y11 / ⊿y
を得ます。
v1 = h11 * i1 + h12 * v2 ・・・・・ (3)
i2 = h21 * i1 + h22 * v2 ・・・・・ (4)
Zパラメータの従属変数はv1、v2ですが、(4)式を変形すると
ただちにv2の式が得られます。
v2 = -(h21 / h22) * i1 + 1 / h22 * i2 ・・・・・ (4')
Zパラメータの式と比較すると
z21 = -h21 / h22
z22 = 1 / h22
を得ます。次に、v2を消去するため(4')式を(3)式に代入します。
v1 = h11 * i1 + h12 * {-(h21 / h22) * i1 + 1 / h22 * i2}
= h11 * i1 - (h12 * h21 / h22) * i1 + (h12 * / h22) * i2
= (h11 * h22 - h12 * h21) / h22 * i1 + (h12 / h22) * i2
⊿h = h11 * h22 - h12 * h21と 置換えると
v1 = (⊿h / h22) * i1 + (h12 / h22) * i2
Zパラメータの式と比較すると
z11 = ⊿h / h22
z12 = h12 / h22
を得ます。
i1 = y11 * v1 + y12 * v2 ・・・・・ (5)
i2 = y21 * v1 + y22 * v2 ・・・・・ (6)
Hパラメータの従属変数はv1、i2ですが、(5)式を変形すると
ただちにv1の式が得られます。
v1 = (1 / y11) * i1 - (y12 / y11) * v2 ・・・・・ (5')
Hパラメータの式と比較すると
h11 = 1 / y11
h12 = -y12 / y11
を得ます。次に、v1を消去するため(5')式を(6)式に代入します。
i2 = y21 * v1 + y22 * v2
= y21 * {(1 / y11) * i1 - (y12 / y11) * v2} + y22 * v2
= (y21 / y11) * i1 - (y12 * y21 / y11) * v2 + y22 * v2
= (y21 / y11) * i1 + (y11 * y22 - y12 * y21) / y11 * v2
⊿y = y11 * y22 - y12 * y21と 置換えると
i2 = (y21 / y11) * i1 + (⊿y / y11) * v2
Hパラメータの式と比較すると
h21 = y21 / y11
h22 = ⊿y / y11
を得ます。
v1 = z11 * i1 + z12 * i2 ・・・・・ (1)
v2 = z21 * i1 + z22 * i2 ・・・・・ (2)
Hパラメータの従属変数はv1、i2ですが、(2)式を変形すると
ただちにi2の式が得られます。
i2 = -(z21 / z22) * i1 + (1 / z22) * v2 ・・・・・ (2')
Hパラメータの式と比較すると
h21 = -z21 / z22
h22 = 1 / z22
を得ます。次に、i2を消去するため(2')式を(1)式に代入します。
v1 = z11 * i1 + z12 * i2
= z11 * i1 + z12 * {-(z21 / z22) * i1 + (1 / z22) * v2}
= z11 * i1 + (-z12 * z21 / z22) * i1 + (z12 / z22) * v2
= (z11 * z22 - z12 * z21) / z22 * i1 + (z12 / z22) * v2
⊿z = z11 * z22 - z12 * z21と 置換えると
v1 = (⊿z / z22) * i1 + (z12 / z22) * v2
Hパラメータの式と比較すると
h11 = ⊿z / z22
h12 = z12 / z22
を得ます。
| 行列名 | Y | Z | H | |||
|
y11 | y12 | z22/⊿z | -z12/⊿z | 1/h11 | -h12/h11 |
| y21 | y22 | -z21/⊿z | z11/⊿z | h21/h11 | ⊿h/h11 | |
|
y22/⊿y | -y12/⊿y | z11 | z12 | ⊿h/h22 | h12/h22 |
| -y21/⊿y | y11/⊿y | z21 | z22 | -h21/h22 | 1/h22 | |
|
1/y11 | -y12/y11 | ⊿z/z22 | z12/z22 | h11 | h12 |
| y21/y11 | ⊿y/y11 | -z21/z22 | 1/z22 | h21 | h22 | |