概要
フォト・リフレクタにより白色(または黒色)のラインを検出しながら、ライン・トレースするロボットです。
移動はマブチ・モータと田宮のギヤ・ボックスを使用していますが
移動速度は速くはないです。
仕様
一応(?)、マイクロマウス大会のロボ・トレース競技に参加出来るロボットを製作します。ただし、ロボットの速度が(著しく)遅いため、決勝進出は望むべくもなく
完走することのみを目標とします。
ロボ・トレース競技規定は、公益財団法人ニューテクノロジー振興財団の
ホームページを参照してください。
外観
-
製作中。
電気系統
- ブロック図
- CPUボード
- センサー・モジュール
- DCモータ・ドライブ
- 中継基板
- CPUポート割り付け
- 電源系統
メカ構成
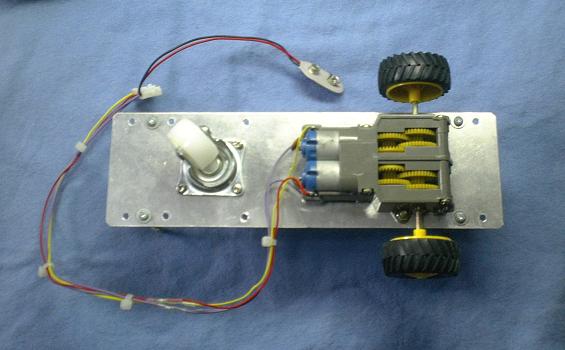
ベースはアルミ板を加工して作りました。ギヤボックスは田宮のITEM No.70097をギヤ比203:1で使用しています。
モータはギヤボックス付属のマブチモータFA-130です。
ゼロ号機は、上部構造が重たく、このモータにはかなりの負荷になっています。
また、ホイールは田宮のITEM No.70101を使用しています。
キャスタはホーム・センターで一番小型のものを入手しました。
- ベースを上から見たところ
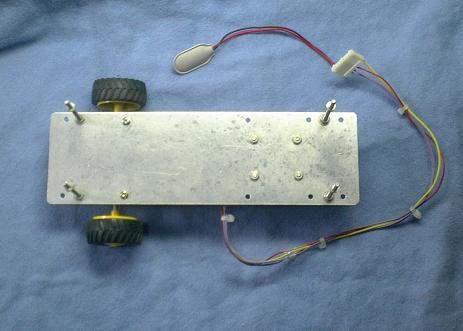
- ベースを下から見たところ
- 基板配置図(2F部分)

- 基板配置図(1F部分)

設計
- 設計条件
-
(1)
(2)
(3)
使用部品
製作
動作確認
今後の課題
関連項目
- フォト・リフレクタの実験
-
- R8マイコン(M12A)CPU実験ボード
- DCモータ・ドライブの制御実験
参考文献
- なし。