まずは結果です。
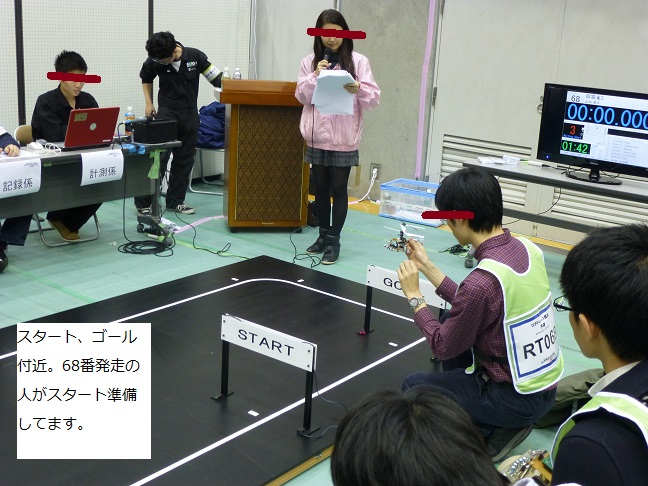
うわぁ~、じかんがな~い! と言う、製作状況ではありましたが、 今年(2015)、ようやく急こしらえのロボットで マイクロマウス大会に初参戦することが出来ました。(^o^v ところで、マイクロマウス大会にはいくつか競技種目があり、 ロボットが迷路を通り抜ける競技だけではなく、 「ロボ・トレース競技」とゆう種目もあります。 私が今回参加したのは、このロボ・トレース競技です。 使用したロボットは、現在製作中のライン・トレース・ロボットです。 初めての参戦となる今回は、もちろん予選突破などは目標ではなく 完走が目標です。もともと製作していたロボットの目標に ライン・トレースは想定していなかったため、早く走ることは 構造上、考慮していなかったからです。(^^; ロボットの名称は「シリコン・スピリット(暫定版)」としました。 何が(暫定版)かと言うと、CPU基板が本来H8マイコンを使用する 予定が、プログラム制作が間に合わず、 今回はR8マイコンの実験ボードを使用したからです。 さて、本年の結果ですが、 ロボ・トレース競技のエントリーマシンは全121台。 このうち、棄権が13台あったため、予選参加は108台。 そして、出走したロボットのうち、途中でのリタイアが36台 となりました。このため完走は72台です。 で、肝心の「シリコン・スピリット(暫定版)」の成績は 目標としていた完走をなんと実現出来ました。\(^o^)/ タイムは1分59秒で、完走ロボット72台中72位でした。(^^; やってみて判ったのですが、実は完走するのは意外と 難しい目標でした。ラインのトレースが難しい訳ではありません。 競技規定では、ゴールにたどりつくだけでは完走とならず、 ゴールした後「自動停止」することで初めて完走と見なされる からです。ゴールしても自動停止しなかった場合は記録上 「リタイア」扱いとなります。 何故、自動停止が難しいかと言うと、ラインのコースは 必ず、最低1箇所ループするところがあります。当然、そこでは コースがクロスします。このクロスとスタート・マーカ、 ゴール・マーカとを区別する必要がありますが、センサからの 信号は必ずしも理想的ではないために難しいのです。 大会で他のロボットの走行を見ましたが、 この自動停止に失敗するロボットが少なからずいました。 大会の結果はこちら。


大会までの道のり
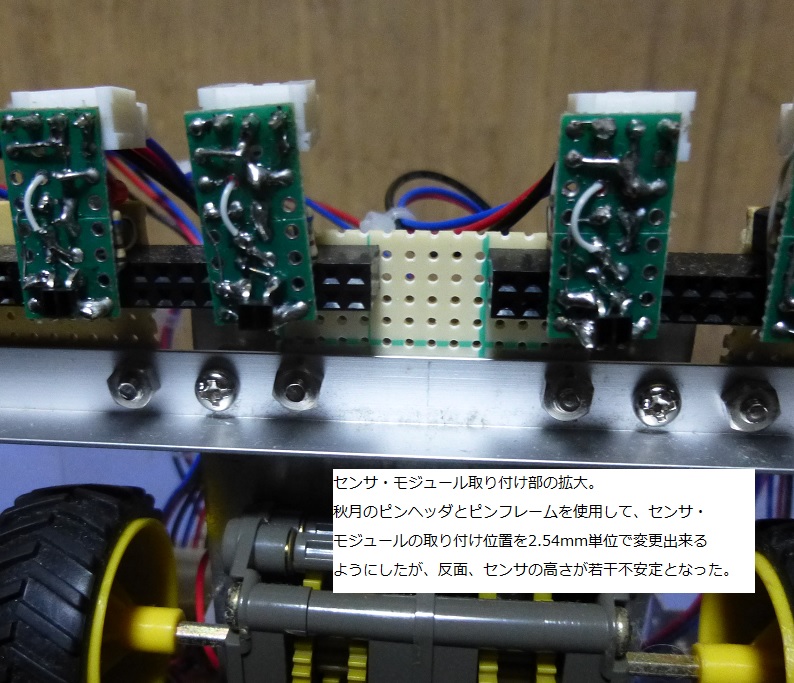
■9月1日からオンライン登録開始。期間は9月末まで。 製作はこれからだが、大会の11月21日まで、2ヶ月半あるし、 まあ何とかなるか、と思い、まずは登録。 このとき、クレジット・カードで参加料3k\を支払う。 ■10月末までにテクニカル・データ登録。 参加登録だけでは、仮登録の段階で、テクニカル・データの 登録を以って本登録となります。テクニカル・データとは ロボットで使用しているCPU、モータ、電池などの仕様や 外形寸法、そしてアピール項目などがあります。 しかし、私の場合、10月末時点で、ようやくフォトリフレクタ・ モジュールの動作確認が出来た段階で、とてもテクニカル・データの 登録が出来る状態ではなかった。(結局、登録しなかった) ■11月上旬。事務局よりメールが届く。 「本来、テクニカル・データを登録していないと、大会に参加 出来ないが、特別に参加させてあげます」とゆう内容。 (すみません。だって、まで全然出来てないので、 外形寸法とかが決まらなかったのです。)(^^ゞ また、別途、ホームページに発走順が掲載された旨の 連絡あり。確かにロボ・トレース競技の97番目に名前有り。 ■6日前。 ようやくハードが完成。センサの位置調整が必要との 認識があったが、まずはラインをトレースするだけの 簡単なプログラムを作成し、走行テストを実施したところ、 いきなりラインをトレースしながら走行したので、 自分でもびっくり! 心配していたコースがクロスする箇所も、とくに プログラム上の工夫をする必要もなく、なんなくクリア。(゜o゜; ■5日前。 あとは、スタートと停止のプログラムのみ。 まずは簡単なスタートのプログラムを追加。 ところで、このとき、ようやく競技規定をよく読んだところ、 ラインは白い床に黒いラインだと思っていたが、実は逆で 黒い床に白いラインであることが判明! ギャフン! デバック環境では白のプリンタ用紙に黒のビニルテープで ラインを製作していたため、DIPスイッチでセンサ入力の 論理を反転する処理を追加して、本番では対処することにした。 ■3日前。 プログラムが一通り完成。最大の問題はゴール・マーカを 検出したのち、スタート・ゴール・エリアと呼ばれる区間で 自動停止する処理。 一方、カーブの開始と終わりにあるコーナー・マーカは特に 検出しないことにした。(高速ロボットは、直線とカーブとで モータ・スピードを可変するために使用するらしい) ■前日 ゴールでの自動停止が全然うまくいかない! 競技規定上、自動停止しないと、完走とは認められない。 プログラムをいろいろいじってみるが原因が特定出来ない状況。 R8マイコンのポートが足りなくて、デバッグ用のLEDがないのも 敗因でした。1度だけ自動停止したが、どうも偶然ぽい。 結局、深夜3時まで調整したが、うまくいかず、仮眠に入る。 ほとんど完走は諦めムード・・・・。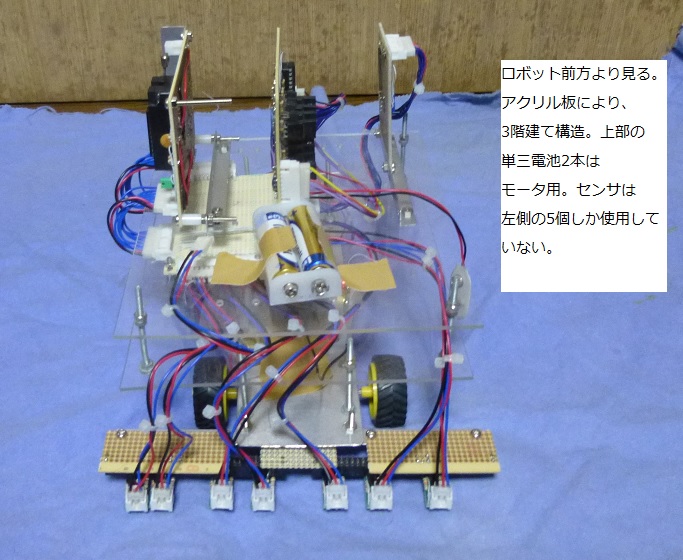

大会当日
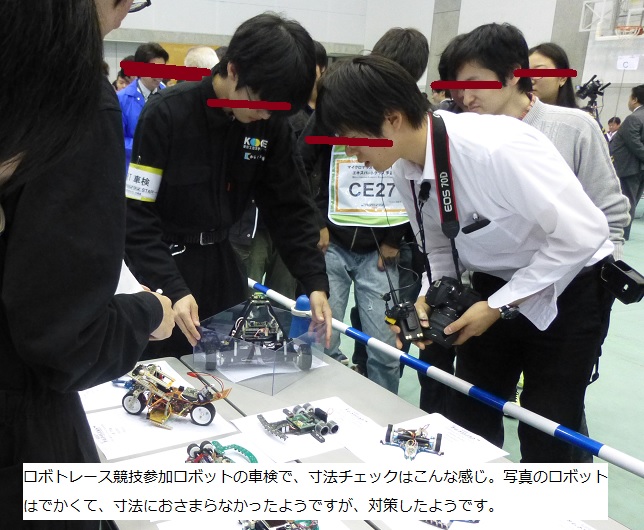
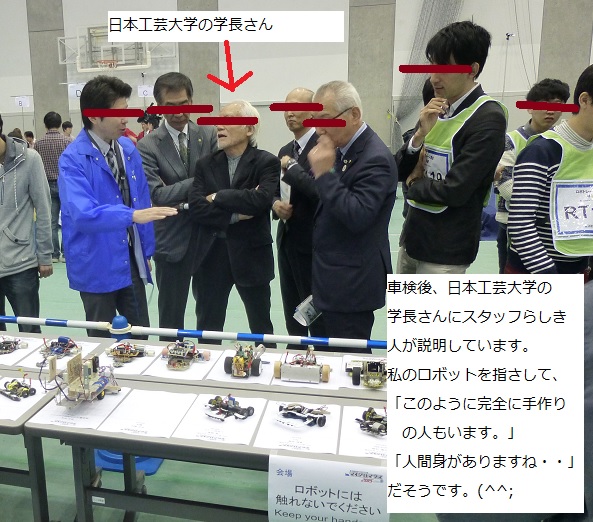
茨城からだと、大会会場の厚木市は遠い。8:50~9:40の受付時間 に間に合わせるため、勝田発5:39の常磐線特急「ときわ」に乗る。 ■会場到着 小田急線の特急に乗って本厚木到着が8時54分頃。 会場の東京工芸大学までバスで約15分。バスは増発されていた模様。 どうにか受付時間に間に合う。 ■受付 受付で名前を言って、パンフレットとゼッケン番号をもらう。 ■控え室 会場の体育館は地下1地上2階建てで、2Fが競技会場。 ところで、ここの体育館は変わった構造で、大学のキャンパス から見て崖の下にあります。キャンパスの1Fから橋を渡って エレベータに乗ると、体育館の2Fに行くのに逆に下に 降りて行きます。(^^; 地下1Fが控室。机が用意されていて、最後の調整をしている人が ノートPCを持ち込んで、すでに机は満席。私は調整する つもりはない(出来ない)ので、荷物だけ壁際に置く。 ■開会式(9:40~10:00) 出席は必須ではないが、開会式があります。 ■車検(ロボ・トレース競技では10:00~10:40) ロボットには寸法規定があるため、車検があります。 ロボ・トレース競技では参加ロボットを全て机に並べて、 一斉車検です。どうやるのか見ていると、透明なな箱を ロボットに被せて、寸法に入るか見ていました。 その後、スタッフらしき人が1台1台写真を撮ったり、 審査員らしき人がロボットの評価(?)らしきことをやっていました。 (同一形状のロボットはただ1台のみ参加出来る、とゆう規定があります。 同じ学校から参加したロボットは似た形状になることが多いので、 その辺をチェックしていたものと思われます。) 高速なロボットは一般的に薄っぺらくて、軽くするためか、 外形が小さいです。に、比べて私のロボットはかなりでかい。(^o^; 車検のため一緒に並べれると、でかいのが目立って、 最初はちょっと恥ずかしかったですが、少数派ではあるが、 でかいロボットもけっこうありました。 車検が終わった後、競技開始までは、車検場所の机に置いたままに しているロボットが多かったので、参加者や一般来場者が その場で他人の作ったロボットを鑑賞出来ます。 遠目から見ていると、私のロボットをしげしげと観察する人や 写真に撮っていく人がときどきいました。(^^; ユニバーサル基板のみを使用した手作り感あふれるロボットは 少数派のためか、世の中には気になる人がいるみたいです。 病気(?)な人たちだなぁ。(^^; ■待ち時間 ロボ・トレースの競技開始は11:00から。 私の発走順番は97番目なので、午後2:30頃になりそう。 前の人のレースを見たりして時間をつぶすが、やはり待ちが ちょっと長い。寝不足の身には応えます。(^^;; 途中、センサの調子を見ようと会場にある テスト・コースでテスト。 えっ!! センサが誤動作している。 やはり、自宅のコースとは条件が違う! あわてて、センサ基板の高さを調整。 どうにか正常に動作するようになった。 しかし、自宅では白紙にテープを貼り付けたテストコースだったが、 会場では板なので、むしろ条件は安定していた。 (こんなこともあろうかと、修理用工具を一式持って行ったのは 正解でした。) ■予選走行本番 持ち時間は3分間。この間に最大3回まで走行が可能で、 そのうち最短の時間が記録となる。 もともと早く走るとゆう目的で製作したわけではない、 「シリコン・スピリット(暫定版)」は、 当然(?)1回目の走行で持ち時間のうち2分くらいを使った。(^o^; そして、いよいよゴール。 この後、奇跡が起きた。 なんと、唯一1回目の走行で、ロボットが自動停止した! 自分でもびっくり。 お陰様で、目標の完走を達成し、1分59秒が私のロボット 「シリコン・スピリット(暫定版)」の公式記録となりました。\(^o^)/ ■走行終了後 後から判りましたが、完走するとレース終了後に記録の認定書が 出たらしい。私は、昨夜は1.5時間くらいしか寝ていなかったので、 疲れ切って早く帰りたかったことと、完走に満足したことから、 競技の終了を待たずに帰途につきました。
今後の予定・課題
完走とゆう目標を達成した一方で、とくにロボ・トレース競技で 上位に入るとゆう希望はないのですが、 とりあえず来年(2016)も参加するつもりです。 まだ、やってみたいことが残っているからです。 で、それまでに以下の点を改良する計画です。 (1)車体は基本的には本年のままとしますが、3分間にせめて 2回は走行出来るよう、スピード・アップを検討する。 具体的には、田宮のギヤ・ボックスを高速モードの組み合わせに 変更(現状は低速モード、車体が重いので)。また、モータの電圧を いくらか上昇させる、などを検討します。 (2)CPUボードをR8マイコンからH8マイコンに変更。 (3)デバッグ用にLED表示器を追加。 (4)制御プログラムはC言語から少なくともFORTH言語に変更。 (これも暫定ですが) (5)あと、自宅のテスト・コースも何とかしなければなりません。(^^; プリンタ用の白紙に黒テープでは、センサとラインとの距離が 一定にならないため、センサの誤動作が頻発するようなので。
おまけ
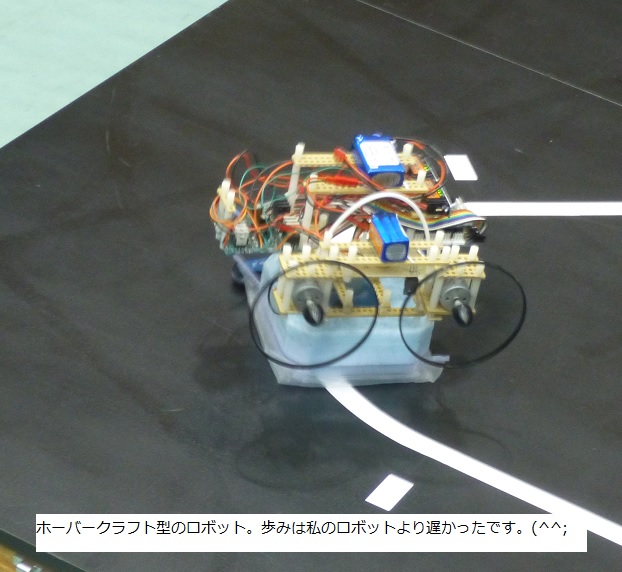
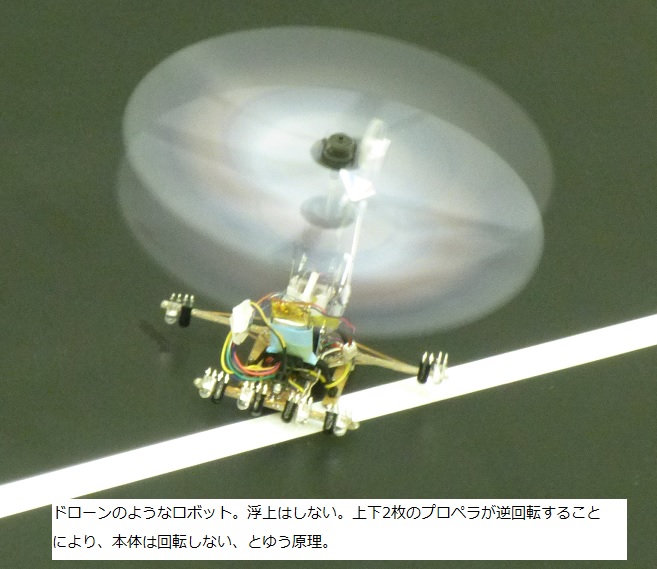
たいへんオリジナルなロボットを製作してきた人が何人かいました。 それらのロボットは完走出来ないものも多かったですが、 個性的な原理のロボットを人前でお披露目するのが目的と思われ、 こうゆう楽しみ方もあるかな、と勉強させられました。 (1)車輪は持っているが、移動手段はプロペラで後方に風を 噴き出して前進するロボット。 (2)車輪は持っておらず、ホーバークラフトのような構造で、 車体の下から空気を噴き出して床からわずかに浮上し、 2個のプロペラで後方に風を吹き出しながら前進するロボット。 (3)1個の軸に2個のプロペラを取り付け、プロペラを反対方向に 回転させながらわずかに浮上して移動するロボット。 プロペラが反対方向に回転しているので本体は回転しない、 とゆう原理。一種のドローン。(完全に浮上してしまうと、 ラインをトレースしていないと判定されると思われる。) このロボットは直線はトレース出来たが、カーブをトレース 出来ず、結局コース・アウト。 ちなみに、これを作った人はマウス競技にもエントリーして いたらしく、そちらではなんと2足歩行ロボットで参加した らしい。(残念ながら私は見ていません) (4)左右2つの車輪で自立しながら移動するロボット。 韓国の人でした。 ちなみに、このロボットは車検にひっかかてました。 基板がはみ出しているとか。修正したものと思われます。 (5)オートバイのような形状のロボット。タイヤが太いので 停止していても倒れません。進路を変えるとき、前輪の 角度の可変範囲に限界があり、Rの小さなカーブを曲がれず 立ち往生して、これも完走出来ませんでした。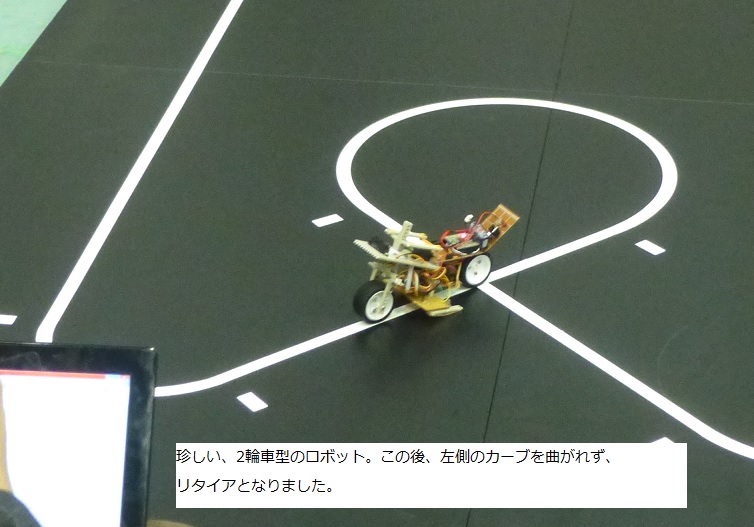
おまけ(2)
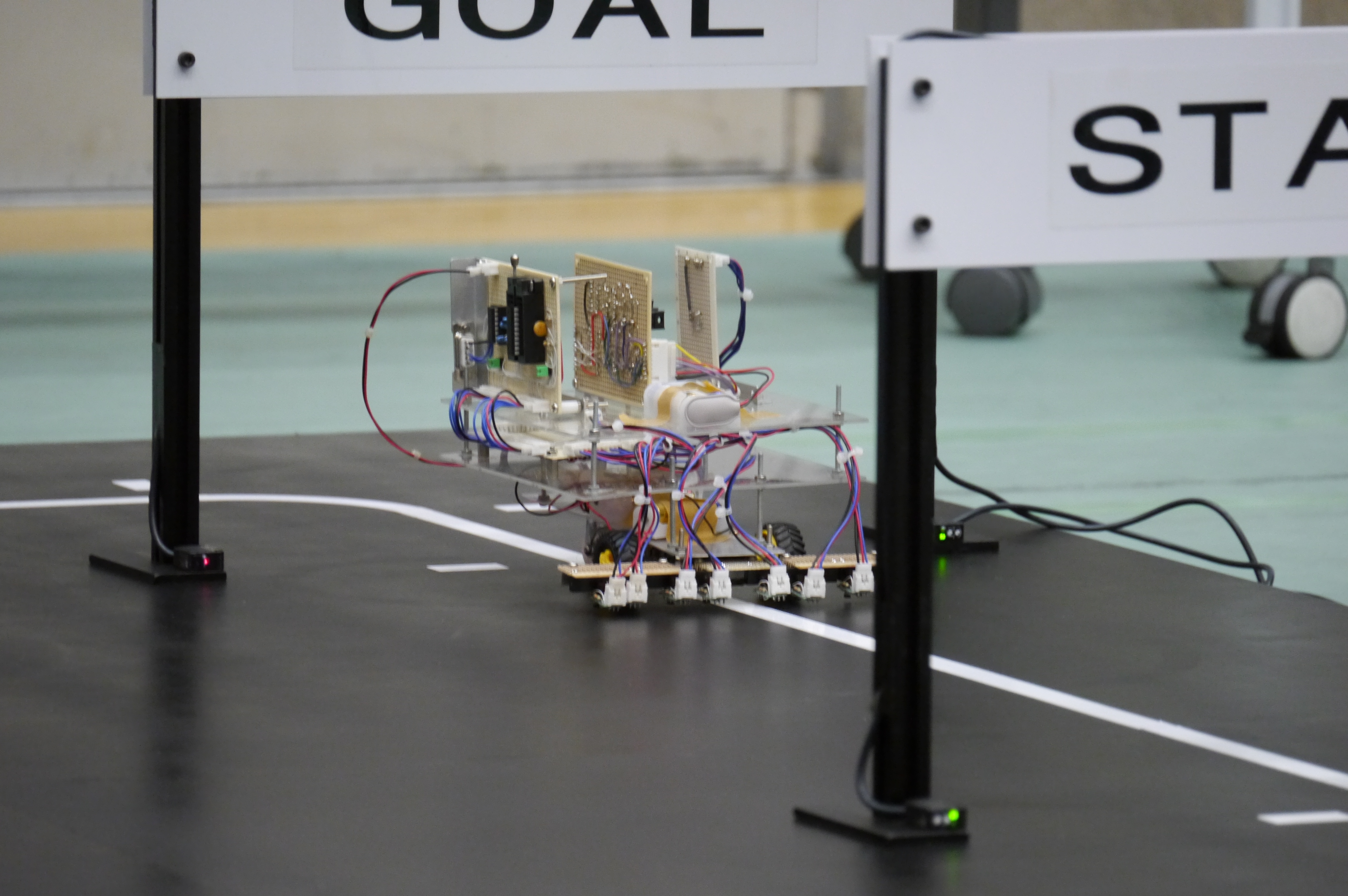
マイクロマウス大会2105のレポートが 大会ホームページに掲載され、ロボ・トレース競技の スナップ写真の1枚に、私のロボットが掲載されました。 ゴール直後に自動停止した、感動の瞬間(個人的感想(笑))の 一コマです。 私のロボットの写真はこちら。 レポートのページはこちら。 (少し、重たいです。)
{kind=link}